Kako deluje podmornica
Podmornica je plovilo, ki lahko pluje pod vodo. Uporablja se v civilne, raziskovalne ali vojaške namene.
Dvigovanje in spuščanje podmornice
Dvigovanje in spuščanje podmornice ločimo na statično in dinamično. Statično deluje na principu spreminjanja plovnosti, torej skupne gostote podmornice v primerjavi z gostoto izpodrinjene vode. Ko podmornica plava na gladini, so balastni tanki prazni, zato je skupna gostota podmornice manjša od gostote vode. Pri potopu se prvi z vodo napolnijo glavni rezervoarji, ki so locirani na težišču celotnega trupa. Podmornica iz njih na zgornji strani trupa spušča zrak, na spodnji pa vanje doteka voda iz okolice. Za bolj natančno ter hitro prilagajanje globine uporabljajo manjše tanke, ki so locirani pri nosu in pri repu podmornice in tako omogočajo nagib naprej ali nazaj. Grajeni so, da prenesejo višje obremenitve kot glavni balastni rezervoarji.
Ko se rezervoarji napolnijo in je skupna gostota podmornice enaka gostoti izpodrinjene vode, podmornica več ne tone. Na tak način lahko pluje ali miruje na določeni globini. Za dvigovanje podmornica uporabi obratno metodo, vodo v balastnih tankih mora nadomestiti z zrakom. Ta zrak se na podmornici hrani pod tlakom.
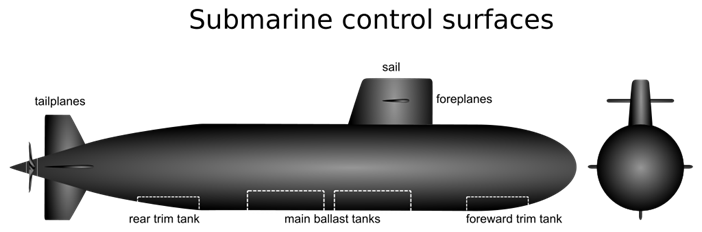
(https://en.wikipedia.org/wiki/File:Submarine_control_surfaces2.svg, pridobljeno: 26. 4. 2020)
Dinamično potapljanje je ključno za spreminjanje globine, na kateri pluje podmornica. Ko so balastni tanki napolnjeni, se z njimi ni moč potopit še globje. Dinamično potapljanje deluje na principu ustvarjanja dinamičnega vzgona. Tega podmornica generira s tako imenovanimi površinami oz. plavutmi, ki spominjajo na krila letala. Te delujejo podobno, kot pri letalih v zraku. Za ohranjanje globine je namreč pomembno konstantno popravljanje.
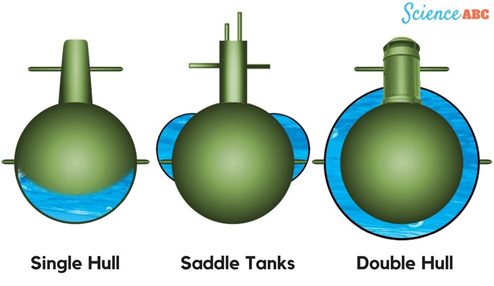
Od položaja in izvedbe balističnih tankov in pogona je odvisna predvsem oblika podmornice ter postavitev prostorov za posadko.
Komunikacija
Vojaške in civilne podmornice uporabljajo podobne senzorje pod vodo.
VLF ali zelo nizkofrekvenčni radio omogoča komunikacijo, ko je podmornica na gladini ali do 79 m pod njo.
ELF ali ekstremno nizkofrekvenčni radio se uporablja, kadar želi plovilo z gladine komunicirati s potopljeno podmornico. Težava takega radia je majhna pasovna širina in se zato uporablja za poziv podmornice, da se dvigne na nižjo globino, kjer je mogoča povezava z VLF.
Plovna antena omogoča globje potopljeni podmornici komunikacijo z uporabo VLF.
Podmornica lahko opravlja tudi hitre prenose informacij, ki trajajo le delček sekunde in na tak način zmanjša možnost za odkritje.
Sistem Gertrude se uporablja za komunikacijo z ostalimi podmornicami. Deluje kot sonar telefon, kjer ena podmornica oddaja zvok z zvočniki, druga pa ga zazna s pasivnimi senzorji. Ta sistem se uporablja za komunikacijo na krajših razdaljah. Težava pri vojaških aplikacijah je, da zaradi oddajanja zvoka v okolico lahko signale zaznajo tudi sovražna plovila.
Senzorji
Senzorji, ki jih podmornice uporabljajo za zaznavo okolice, so lahko aktivni ali pasivni.
Aktivni sonar generira zvok, ki se odbija od bližnjih površin in zaznava odmev. Sodobne vojaške podmornice le redko uporabljajo aktivne sisteme za zaznavo, saj na tak način postanejo vidne plovilom v okolici.
Pasivni sonar uporablja komplet občutljivih podvodnih mikrofonov, ki zaznavajo zvok. Večkrat so nameščeni na lupini, lahko pa jih podmornica tudi vleče za sabo, da ne zaznava hrupa lastnega motorja.
Periskop je zložljiva cev s prizmo, ki omogoča pogled nad gladino. V sodobnih podmornicah se ga redko uporablja, saj je vidljivost slaba. Periskopske cevi so nadomestili drogovi, ki nad površje dvignejo set kamer. Tak sistem zasede manj prostora kot klasičen periskop, kar prikazuje spodnja slika. Zato pomembno vpliva na izrabo prostora v trupu. Tak zložljivi drog omogoča namestitev kompleta kamer, kot so IR kamere in kamere z visoko resolucijo.

(https://en.wikipedia.org/wiki/File:Comparison_of_Sail_and_Periscope_Virgina_Class_Submarine.jp, pridobljeno: 26.4.2020)
Navigacijski sistem
Kakšen navigacijski sistem uporabljajo? Globoko pod vodo običajni navigacijski sistemi, kot se uporabljajo na površju, ne delujejo.
V sodobnih podmornicah se najpogosteje uporablja inercijski navigacijski sistem, ki s pomočjo računalnika, pospeškomerov (zaznava premikov) in giroskopov (zaznava rotacije) preračunava in ocenjuje položaj, orientacijo in hitrost podmornice. Slabost te metode je, da s trajanjem potopa izgublja natančnost. Zato mora podmornica občasno določiti točen položaj, za kar uporabi GPS, periskop ali alternativo periskopu.
Pogon
Pogon podmornice ima velik pomen pri velikosti in hitrosti podmornice. Skozi leta so se razvile različne rešitve na področju pogona podmornic. Prve podmornice so bile na človeški pogon in so bile precej majhne, te so v 19. stoletju nadomestile podmornice na paro, stisnjen zrak ali elektriko, spravljeno v baterijah.
- Motorji z notranjim zgorevanjem in baterije
Preboj se je zgodil, ko so v podmornico vgradili motor z notranjih izgorevanjem, ki je omogočal površinsko plovbo in polnil baterije za pogon pod vodo. Motor z notranjih izgorevanjem namreč za delovanje potrebuje zrak, ki pa ga je pod vodo težko dovajati. Slabost je bila v omejeni kapaciteti baterij, zaradi katere se je moral kapitan odločati med hitro in dolgo plovbo.
- Jedrski pogon
Naslednja velika inovacija na področju pogona podmornice je jedrski pogon. Ta zagotavlja teoretično neskončno delovanje. Podmornice s takšnim pogonom so omejene le z zalogami hrane na krovu in zato lahko plujejo neopazno pod vodo do 6 mesecev. Težava pri jedrskem pogonu je kompleksnost in velikost reaktorja, ki zagotavlja energijo.
- Ne-jedrski pogon, neodvisen od zraka
Sodobne podmornice težijo k uporabi pogona, ki je neodvisen od zraka. Za delovanje lahko uporabljajo tudi tri različne motorje. Diesel motor uporabljajo za plovbo na gladini in polnjenje baterij, pod gladino uporabljajo električni motor za hitro plovbo in motor na vodikove gorivne celice za tiho plovbo.
Viri
Wikipedia, Submarine, 27.4.2020: (https://en.wikipedia.org/wiki/Submarine#Submersion_and_trimming)




{kind=link}